Computationally efficient approach for stochastic reachability set analysis
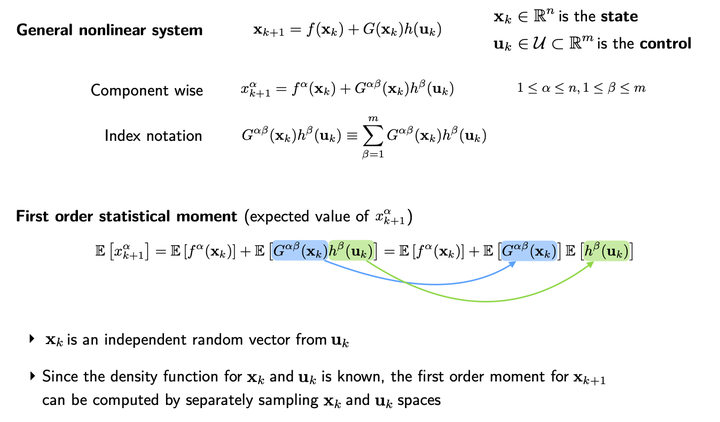 Image credit: Damien Guého
Image credit: Damien Guého
This research work aims to study the significant challenges associated to automating the decision support system of maneuvering Unmanned Autonomous Systems (UAS) in presence of nonlinearities, uncertainties associated with system parameters, states and external disturbances together with an embedded control input. Three different probabilistic approaches to compute the reachability sets for a class of discrete-time nonlinear systems are investigated. In the first approach, the central idea is to pose the computation of the state density function at any time as the convolution of two probability density functions to avoid the exponential growth in samples while in the second approach, a quadrature method utilizes the Conjugate Unscented Transform (CUT) to compute the probability density function. To overcome the significant challenge of taking multi-dimension convolution of state density function, the second approach computes the probability density function using the Principle of Maximum Entropy (PME). The third approach utilizes the Conjugate Unscented Transform (CUT) method to curtail the combinatorial growth of samples. The resulting probability density function is proposed as a set of polynomial expansion and sparse approximation methods are leveraged to solve the resulting convex optimization problem.
Work in collaboration with Amit Jain and Puneet Singla.
Damien Guého
PhD, Aerospace Engineer
My research interests include data-driven analysis and control of dynamical systems, with particular interests for high-dimensional and complex dynamical systems, data-driven system identification, reduced-order modeling, uncertainty quantification, stochastic analysis and model-based control.