Optimal feedback control under uncertainty for hypersonic re-entry vehicles
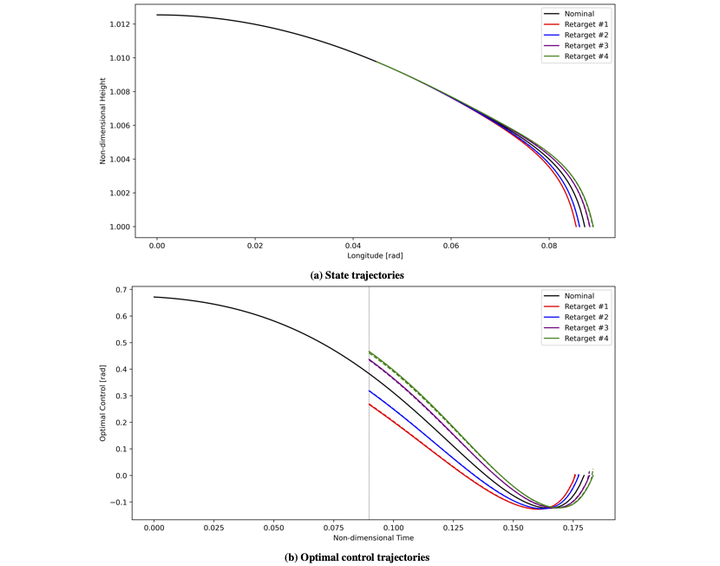 Image credit: Damien Guého
Image credit: Damien Guého
The objective of this work is to establish flexible, accurate and navigable flight trajectories for hypersonic vehicles without human interference. On a larger scale, the idea is to accurately plan the path of super-fast vehicles from one point to another while accounting for multi-physics dynamical models and any path or actuation constraints. In this project involving several Universities, I have been developing methods using optimal open-loop solutions to derive appropriate feedback control structure from over an complete dictionary of basis functions with the help of sparse approximation tools. A planar hypersonic maneuver corresponding to maximizing the terminal velocity of the payload has been considered to validate the proposed approach and simulation results clearly demonstrate the efficacy of the method in providing optimal feedback control law for prescribed uncertainty in boundary conditions and model parameters.
Work in collaboration with Carlos Vargas Venegas, Mihir Vendentam and Puneet Singla.
Damien Guého
PhD, Aerospace Engineer
My research interests include data-driven analysis and control of dynamical systems, with particular interests for high-dimensional and complex dynamical systems, data-driven system identification, reduced-order modeling, uncertainty quantification, stochastic analysis and model-based control.