Unified and robust data-driven framework for reduced-order modeling and model-based control
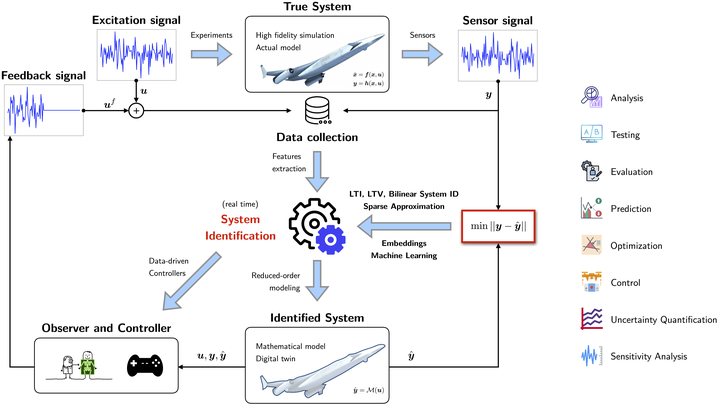 Image credit: Damien Guého
Image credit: Damien Guého
The objective of this research effort is to develop a computationally fast, robust and accurate data-driven framework (as a Python package) that combines the latest techniques in reduced-order modeling, analysis and control of challenging dynamical systems. Eventually, this framework will allow to be operated real-time, with real-time data collection, process - all achieved on-board (with potential applications for autonomous aerospace vehicles, hypersonics and space missions). Eventually, the extended system identification module is to be augmented with an estimation and uncertainty quantification/propagation module, a data-driven model-based control and parameters estimation/update module. The research work and the implementation is still in progress.
Work in collaboration with Puneet Singla.
Damien Guého
PhD, Aerospace Engineer
My research interests include data-driven analysis and control of dynamical systems, with particular interests for high-dimensional and complex dynamical systems, data-driven system identification, reduced-order modeling, uncertainty quantification, stochastic analysis and model-based control.