Distinct plant/controller data-driven identification framework for closed-loop dynamics
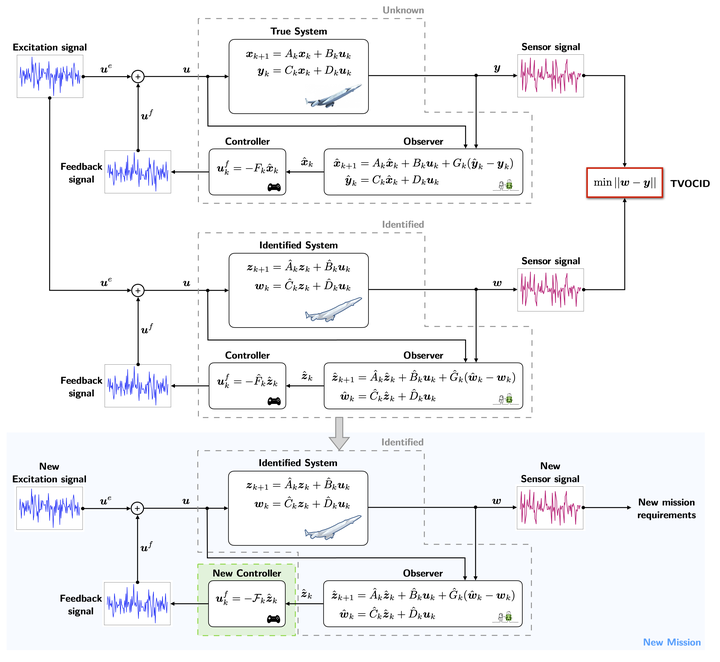 Image credit: Damien Guého
Image credit: Damien Guého
Accurate and distinct modeling of process and controller dynamics arises in cases where a system may be operating in closed-loop and only closed-loop data are available for identification or if an open-loop model of the system is required to be identified from closed-loop data for the purpose of structural analysis or controller re-design. This work introduces a framework for the identification of closed-loop system and observer/controller dynamics from experimental data only. The system, observer gain, and controller gain Markov parameters are recovered from the identified observer/controller Markov parameters and a state-space model of the system as well as the corresponding observer and controller gains are identified using a state-space identification method such as the time-varying eigensystem realization algorithm. Modal parameters including frequencies, dampings, mode shapes at the sensor locations are then recovered from the open-loop system matrices. When the mission requirements as well as the associated optimal controller change, a new controller based on a new mission scenario can be designed and integrated within the closed-loop dynamics given the identified model.
Damien Guého
PhD, Aerospace Engineer
My research interests include data-driven analysis and control of dynamical systems, with particular interests for high-dimensional and complex dynamical systems, data-driven system identification, reduced-order modeling, uncertainty quantification, stochastic analysis and model-based control.